<> コラム
自動制御②|特定技能 ビルクリーニング
 |
植村 貴昭 この内容を書いた専門家 元審査官・弁理士 行政書士(取次資格有) 登録支援機関代表 |
自動制御②|特定技能 ビルクリーニング
フィードバック制御
フィードバック制御は、目標値と制御値の偏差を検出して、自動制御を行う方式です。
現時点での要素値を検討する為の時間が必要になるため、制御には必ず遅れが伴います。
偏差が検出されるまで制御系は全く動作しないという特徴があります。
扱う情報は連続性を持っており、制御の回路構成は閉ループとなります。
フィードバック制御は、目標を変更した場合直ぐに制御値が追従させる場合、
外乱に対してその作用を打ち消す場合に採用させる制御方法です。
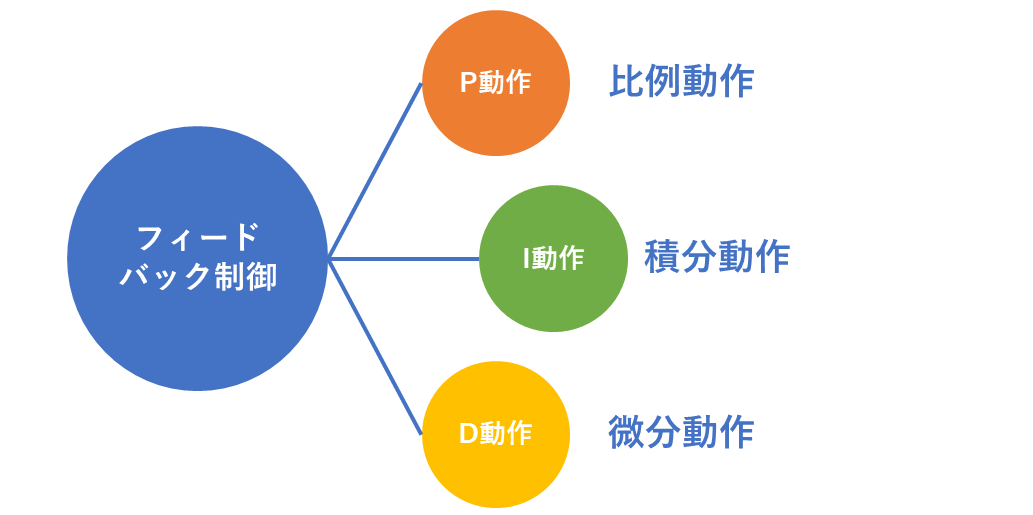
フィードバック制御の比例動作(P動作)、積分動作(I動作)、微分動作(D動作)の
3種類があります。
比例動作は単独で使用されていますが、
積分動作と微分動作は比例動作に組み合わせて使用します。
-
比例動作(P動作)
比例動作は、操作量をオンオフのような2値ではなく、
0%~100%の幅で連続的に変化される制御方式です。
比例制御では、比例帯と呼ばれる制御量の変化幅を決め、
その範囲内で0%~100%の制御を行います。
比例帯が狭い場合、0%から若干の変化をしても大きく制御値が変化します。
比例幅を小さくすればするほど、オンオフ制御に近くなります。
逆に、比例幅を広くすると、制御出来る幅が小さくなりますが、
制御の設定値と結果に対して安定性が高まります。
比例動作を行う場合、比例帯を適正に設定し、
制御対象に合わせたシステムを構築するのが重要です。
比例制御では、温度センサーや圧力センサーなど、
検出部の情報を取り込んで適正な制御値に近づける動作を行います。
高温蒸気と水を用いた簡単な温度制御で考えてみます。
50%-50℃としている水温目標値を、75%-75℃に設定変更した場合、
温度センサーによって水の温度検出を行い、
目標の75℃に近づくまで蒸気の電磁弁を開放して温度調整します。
温度センサーが目標温度に近づくまで、蒸気が開放・閉止を繰り返し、
水温がプラス・マイナス方向に何度も行き来した後、
ある一定値になったことを検出部が検知して制御が完了し、
以降は温度が変化するまで制御は停止状態です。
しかし、比例制御だけではどれだけ安定した状態を目標にしても、
若干の偏差が残っていることが多く、これは定常偏差と呼ばれています。
比例動作では、瞬間的に発生した外乱や目標値の変更に対して、即応しようとします。
目標値と制御値がいつまでも収束せず、一定の偏差残ってしまいます。
目標値に対し制御値が振動してしまう、持続振動状態であります。
-
積分動作(I動作)
積分動作は、偏差の積分値に比例した操作が可能な動作です。
比例動作の限界である定常偏差をリセットし、制御を安定させることが可能です。
比例動作と積分動作を組み合わせ、比例積分動作(PI動作)として利用されています。
積分制御では、比例動作で発生した偏差を足していき、時間と共に制御値を微調整し、
定常偏差がゼロになるように制御する動作です。
比例積分動作では、偏差が外乱などで急激に変化した時、即応することが困難です。
偏差が発生しても、一定の時間が経過しなければ制御されず、即応性に欠けます。
そこで、制御に微分動作を組み合わせ、偏差の急激な変化にも素早く応答し、
安定した制御とする微分動作が組み合わせられます。
-
比例積分微分動作(PID動作)
比例積分微分動作は、線形動作でも、最も安定した動作であり、
比例動作が持っている定常偏差を解消しつつ、即応性のある制御が可能な制御です。
微分動作は、偏差の変化率を検出し、変化率に比例した操作量で制御されます。
偏差の変化率から、将来どれくらいの偏差が発生するかを予測して操作量が決められるため、
微分動作を組み込むことで、偏差の変化に対しての過渡応答特性を改善出来、
安定した制御が可能です。
比例動作で現在生じている偏差を小さくし、積分動作で偏差をゼロに近づけ、
微分動作で大きな偏差の変化にも安定を維持するといった制御も可能になります。
どんどん自動化が進んでいます。